数据结构
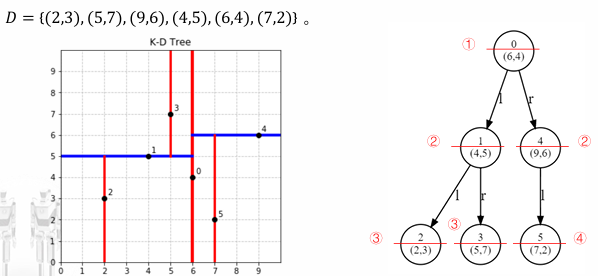
K-Dimensional Tree (KD-Tree) 是一种用于组织 k 维空间中的点的数据结构,主要用于快速进行范围搜索和最近邻搜索。它可以看作是二叉搜索树在多维空间上的扩展。其结构非常适合寻找最近邻居和碰撞检测.
KD-Tree 的核心思想是通过一系列与坐标轴平行的超平面,将 k 维空间递归地分割成更小的区域。每个区域对应于树的一个节点,存储该区域内的一个数据点。
KD-Tree 是一棵二叉树。
- 节点: 每个节点包含一个 k 维数据点、一个用于分割空间的维度 (split dimension) 和一个分割值 (split value)。
- 子节点 (Children): 节点的左子树包含该分割维度上值小于等于分割值的点,右子树包含值大于分割值的点。
构建 KD-Tree
构建 KD-Tree 是一个递归过程:
- 选择分割维度: 在当前节点的数据集中,选择一个维度用于分割。通常,这个维度是根据树的层级确定的,第0层从方差大的维度开始切分,然后循环选择其他维度;
- 选择分割值: 在选定的分割维度上,找到数据集的中位数作为分割值。将中位数点作为当前节点存储的点。
- 划分数据集: 根据分割值,将数据集中的点分成两部分:小于等于分割值的点构成左子集,大于分割值的点构成右子集。
- 递归构建子树:对左子集和右子集分别递归地构建左子树和右子树。
这个过程持续进行,直到数据集为空或只剩下一个点(作为叶子节点)。
复杂度: 构建一个平衡的 KD-Tree 的时间复杂度通常是 ,然而,在最坏情况下可能会退化。
范围搜索
查找落在指定多维区域(例如一个矩形或球体)内的所有数据点。
- 从根节点开始。
- 如果当前节点的分割超平面与查询区域相交,则需要同时搜索左右子树。
- 如果查询区域完全位于分割超平面的某一侧,则只需要搜索对应的一侧子树。
- 当到达叶子节点时,检查该点是否在查询区域内。
- 剪枝:如果在某个节点,发现以该节点分割值和维度确定的区域完全不在查询区域内,则可以剪掉整个子树。
最近邻搜索
输入:构造好的KDTree,目标样本;
输出:样本的最近邻;
过程:
-
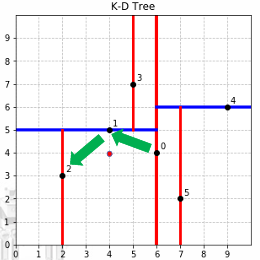
从根节点开始,沿着查询点在每个分割维度上的值,从根结点出发,递归地向下访问𝑘𝑑树,维护当前最近邻点的样本值;
- 若目标点𝑥当前维的坐标小于切分点的坐 标,则移动到左子结点;
- 否则移动到右子 结点。直到子结点为叶结点为止。
- 将该叶子节点作为当前的最近邻点,并记录其距离。
-
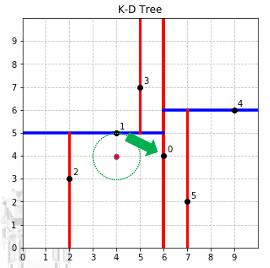
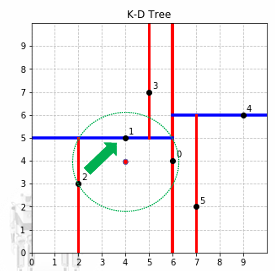
回溯与剪枝 在递归返回的过程中,对于当前节点,检查是否有可能在另一个子树中找到更近的邻居。在回溯过程中,不断更新最近邻点和距离。
-
计算查询点到当前节点分割超平面的距离。
-
如果这个距离小于或等于当前找到的最近邻距离,则需要进入另一侧的子树进行搜索。
-
如果这个距离大于当前找到的最近邻距离,那么另一侧的子树中不可能存在更近的点,可以剪掉该子树,不需要进入搜索。
-
-
当回退到根结点时,搜索结束。
复杂度: 平均情况下,最近邻搜索的时间复杂度是。但在高维空间(k 很大)下,KD-Tree 的性能会急剧下降,搜索可能需要访问树的大部分节点,趋向于 (O(N));
特点
- 维度诅咒: 在高维空间下性能显著下降。对于高维数据,其他方法如 Ball Tree 或局部敏感哈希可能更有效。
- 树的平衡性: 随机插入和删除操作可能导致树失去平衡,影响搜索效率。虽然可以通过周期性地重建树来解决,但这会增加开销。
- 对数据分布敏感: 如果数据在某些维度上高度集中,树可能会变得不平衡。